

"Kiedy nie mam żadnego ważnego problemu do rozważenia, uwielbiam rekonstruować dowody fizycznych i matematycznych twierdzeń, ktore dawno już znam. Nie ma w tym żadnego celu, tylko i wyłącznie możliwość oddania się przyjemności myślenia" [A. Einstein]
EINSTEIN
powiedział kiedyś, że polityka jest trudniejsza od fizyki. Kiedy indziej wspomniał, że nie ma nic praktyczniejszego niż dobra teoria. Zostawmy więc politykę, a zajmijmy się przez chwilę czymś co przyda się każdemu chcącemu poznać fizykę latania (w tym także katastrofy smoleńskiej). Zobaczmy jak prosto i pięknie działa zwyczajna beczka lotkowa w nieuszkodzonym samolocie. I ile warte są w praktyce te analityczne teorie, które dwa rozdziały temu opisywałem jako coś, co nie tylko daje niezłe wyniki w porównaniu z obliczeniami wymagajacymi komputera, ale i ma zaletę tego, że własnie nie wymaga żadnej wiary w to, że ktoś dobrze program napisał lub użył. Zobaczmy, jak ta teoria tłumaczy eksperyment, który specjalnie dla was drodzy czytelnicy zrobiłem. Oczywiscie beczkę, trochę taką jak ta smoleńska, minus dramat i ślady trotylu, chyba że piloci, którzy ze mna czasem lataja, je przywlekli gdzieś z dalekich stron świata.
A skoro mowa o teorii i doświadczeniu, to chciałoby się tu dalej iść śladami Einsteina i przytaczać jego bon moty. Ale to niebezpieczne, bo to był niezły kpiarz. Theory is when we know everything but nothing works. Praxis is when everything works but we do not know why. We always end up by combining theory with praxis: nothing works and we do not know why. No, ale dość gadania.
CÓŻ PORADZIĆ, LUBIĘ BECZKI
Beczka tupolewa PLF 101 pod Smoleńskim (i to dosłownie pod, gdyż odbyła się parę chwil po znalezieniu się PLF 101 około 5 metrów pod poziomem pasa startowego 26) była lotkowa, nie autorotacyjna w głębokim przeciągnieciu. Podobne, równie szybkie (kilkusekundowe), robię zawsze kiedy sobie latam, nawet jak lecę na trasie. Jeśli to bezpieczne. Do tego potrzeba dwóch rzeczy: bezpiecznej wysokości (300m lub wyżej nad ziemią, i prędkość nie za mała, żeby beczka się nie przeciągała a dziób nie opadał za bardzo; w moim Van's RV6A rekomendowana jest w przypadku beczki prędkość 120 kt lub więcej, powiedzmy V > 65 m/s; ja robię przy 70 m/s, tego rzędu).
Na blogu Andrzejmata i innych dyskutowano niedawno pewien aspekt beczek, tłumienie obrotu pod wpływem... obrotu. Jak to jest, liczbowo. Andrzejmat w ogóle jest cześciowo 'winny' temu, że tu pisuję. Rado zadał mi z kolei inspirujace ten rozdział pytanie o szybkość obrotu w hipotetycznej beczce w nieuszkodzonym tupolewie, w moim modelu. To ma zwiazek z pytaniem jak ważne było wychylenie lotek PLF101. Wiemy, że piloci wychylili wolant mocno w prawo po zderzeniu z brzozą Bodina. Później, pod koniec, odpuścili ten skręt wolantu. Czy miało to wszystko duży wpływ na przebieg beczki?
Jest więc świetna okazja, żeby wykorzystać prostą teorię samolotu uszkodzonego, z poprzedniego rozdziału nr 30 i ją uzupełnić tak, by dała opis beczki robionej samolotem nieuszkodzonym, RV6A, a może szerszą klasą samolotów.
Ponieważ przyspieszenie kątowe dω/dt jest zawsze (nawet w przypadku dużego wychylenia lotek, nie koniecznie urwania skrzydła) dość duże, to szybko dochodzi do przyrostu prędkości kątowej wokół osi podłużnej (x), czyli wartości ω. Prędkość chciałaby rosnąć coraz wyżej, mniej więcej liniowo z czasem, jednak nie może, gdyż obrót jest poniekąd samoograniczający się. Im szybciej samolot się przechyla (i im dalej dany kawałek skrzydła leży od osi obrotu - odległość oznaczamy jako y) tym bardziej strumień powietrza "widziany" przez skrzydło odchyla się od swego początkowego kierunku. Opadające skrzydło ma podniesioną do góry lotkę i stąd ma zmniejszony kąt natarcia oraz -zakładamy- proporcjonalnie zmniejszoną siłę nośną; ale "czuje" w dodatku do bardzo szybkiego (V~ 70 m/s) wiatru wiejącego z przodu i tylko nieco z dołu, narastający wraz z rosnącym ω, dodatkowy wiatr od spodu, o szybkości pionowej +ωy. Kiedy zmiana kąta natarcia ze wzgledu na lotke, równa jest mniej więcej zmianie kąta natarcia ze względu na obrót, możemy być pewni, że jesteśmy zbliżeni do sytuacji, w której samolot obraca się, ale już z dω/dt~0, czyli ω~const.
Oczywiście, lotka nie rozciąga się na całe skrzydło, podczas gdy "wiatr" zwiazany z obrotem - tak. Żeby wyznaczyć asymptotyczną prędkość obrotu, trzeba zatem uczciwie przecałkowac momenty sił działajace na poszczególne kawałki skrzydła (stateczniki zaniedbujemy). Już to w rodz. 30 robiliśmy zakladając eliptyczny rozkład sił wzdłuż skrzydła, w ten sposób:
Ixx dω/dt = T = ∫-LL f0 (1 - y2/L2)1/2 y (1 - ω y/Vα0) dy,
gdzie Ixx jest momentem bezwładności, T oznacza moment sił aerodynamicznych, L oznacza w naszym nieuszkodzonym samolocie pół-rozpiętość skrzydła, np. 18.8 m w TU-154 i 3.5 m w RV6A.
Łatwo zauważyć, że przy symetrycznym skrzydle czyli granicach całkowania +-L, jedynka w wyrażeniu [y (1 - ω y/Vα0)] nie daje wkładu do całki bo y*1 to funkcja antysymetryczna. Pominę ją. Jedyne, co musimy tu uzupełnić, to wychylenie lotek, które daje zmianę Δα kąta natarcia, która oszacujemy na podstawie geometrii skrzydła.
T = ∫-LL f0 (1 - y2/L2)1/2 (y/α0) (Δα - ω y/V) dy.
Widzimy, że Δα musi być funkcja niesymetryczną zmiennej y, aby jej wkład do obrotu był niezerowy. Tak właśnie jest, jest to funkcja nieparzysta, jeśli lotki wychylają się na dwóch skrzydłach w przeciwne strony. Funkcja Δα jest niezerowa tylko w obszarach lotek, pomiedzy |y| =l1 a l2 (|l1-l2| to długość lotki mierzona wzdluż y ).
Asymptotyczna prędkość kątowa obrotu to takie ωmax, dla którego dω/dt = T = 0:
∫0L (1 - y2/L2)1/2 y (Δα - 2 ωmax y/V) dy = 0
W tym równaniu zamieniliśmy całkę od -L do L na całkę od 0 do L, ale to oznacza że Δα teraz już jest sumą wartości absolutnych kątow odchyleń lotek. Przechodzimy od zmiennej y do zmiennej bezwymiarowej x = y/L i od granic l1 a l2 do x1=l1/L oraz x2=l2/L,
Δα ∫x1x2 (1 - x2)1/2 x dx= 2(L/V) ωmax ∫0L (1 - x2)1/2 x2dx
Otrzymujemy
OBRÓT USTALONY
ωmax = R2 Δα (V/L),
gdzie R2, a ogólniej Rp(x1,x2 ) jest bezwymiarową stałą zależną od konkretnego położenia lotek na skrzydle (x1 ...x2), którą zdefiniuję jako
Rp(x1,x2 ) = (1/2) [ ∫x1x2 (1 - xp)1/p x dx] / [ ∫01 (1 - xp)1/p x2dx ].
Ten stopień ogólności, tj. nie ograniczanie się do p=2, jest nam potrzebny. O ile w rozdz. 30 przyjąłem, że rozkład sił na skrzydle tupolewa został zaprojektowany tak, by był prawie optymalny (wg twierdzenia, które udowodnił L. Prandtl to odpowiada p=2), o tyle w Van's RV mamy do czynienia ze skrzydłami na planie prostokąta. Takie skrzydła mają rozkład siły nieco inny od eliptycznego. Praca A. M. Berhe (2003) umieszczona w bibliografii (wraz z linkim) opisuje różne rozwiązania rownań skrzydła skończonego dla wybranych jego kształtów. Skrzydła prostokątne mają rozkład sił przesunięty bardziej w kierunku końcowek skrzydeł niż to opisuje elipsa p=2. Wyniki numeryczne dla takiego skrzydła zależa znacznie od bezwymiarowego parametru wydłużenia skrzydła λ = (2L)2/S, gdzie S to pole jego powierzchni. Skrzydła RV6 są krótkie; zaraz zobaczymy do czego to potrzebne; λ = 4.81. Dla porównania, skrzydła tupolewa są dużo bardziej wydłużone, mają λ =7.83 (i są zwężone i skośne).
Zauważyłem, że wyniki Berhe (2003) dotyczace rozkładu sił wzdłuż skrzydła skończonego można dobrze przybliżyć krzywymi typu f = f0 (1 - xp)1/p, gdzie p zależy od parametru wydłużenia λ. To oddaje poniższa tabelka, która jest moim małym znaleziskiem aerodynamicznym. Policzyłem wartości R numerycznie. Napisałem sobie wzory ścisłe, oparte na tym, że całki typu ∫ (1 - xp)1/p x dx daja sie zapisać przy użyciu funkcji hipergeometrycznych jako (x2/2) 2F1(-1/p,2/p;1+2/p;xp), a całki ∫ (1 - xp)1/px2dx jako (x3/3) 2F1(-1/p,3/p;1+3/p;xp). Ale nie przesadzajmy.. i tak trzeba te funkcje hipergeometryczne rozwinąć w szereg i policzyć numerycznie. Tylko w przypadku p=2 wynik jest dany w postaci funkcji elementarnych:
ωmax = (8/3π) Δα (V/L) [(1 - x12)3/2- (1 - x2 2)3/2].
Podaję, bo może ktoś zechce wziąć zupełnie inne położenia i rozmiary lotek i oszacować ωmax z grubsza dla innych konfiguracji lotek, innych samolotów.
Oto kilka wyników:
skrzydła skośne, λ>7 => p=2, R2 (x1,x2 = 0.759,0.890) = 0.1538 ► TU-154
skrzydła skośne, λ>7 => p=2, R2 (x1,x2 = 0.565,0.915) = 0.4210
skrzydła prostok., λ=3 => p=3, R3 (x1,.x2 = 0.565,0.915) = 0.4192
skrzydła prostok., λ=4.8 => p=3.6, R3.6(x1,x2 = 0.565,0.915) = 0.4164 ► RV6
skrzydła prostok., λ=6 => p=4, R4 (x1,x2 = 0.565,0.915) = 0.4145
skrzydła prostok., λ~9 => p=5, R5(x1,.x2 = 0.565,0.915) = 0.4102
To dość intrygujące, że wartości stałych R sa tak mało zależne of wykładnika p, ktory oddawać ma kształt skrzydła! R to niemal uniwersalna stała dla wszystkich skrzydeł, gdzie ustalone jest położenie lotek, np. x1 ...x2 = 0.565...0.915, jak w przypadku RV6; wtedy R ~ 0.42. When the solution is simple, God is answering, jak mawiał nasz znajomy Albert.
Tempo ustalonego obrotu lotkowego nie zależy w teorii ani od: przeciążenia, mocy silnika, kąta natarcia plata, momentu bezwładności samolotu, ani jego masy. Ani od tego, czy ma wysuniete klapy i hamulce powietrzne (interceptory). Ani od temperatury, gęstości, czy ciśnienia powietrza. (Samolot obraca się asymptotycznie tak samo szybko w helu!) Tylko od: zakresu kątowego, w jakim zmienia sie efektywny kat zaklinowania skrzydła przy wychylaniu lotek (1 liczba), od połozen poczatku i konca lotki w stosunku do rozpiętości skrzydła (2 liczby), oraz od tego ile rozpiętości swego skrzydła przelatuje w ciągu sekundy samolot (1 liczba).
Najprościej, ale dokładnie mowiąc, to po przeleceniu w przód połowy rozpiętości swego skrzydła, samolot przechyli się nie wiecej niż o 0.42 albo 0.154 (zależnie od położenia lotek względem skrzydła) zakresu kątów skrzydło-wiatr ze względu na lotki.Czy to nie fajne? Ale co będzie, jeśli się nie sprawdzi...
SPRAWDZAMY TEORIĘ, CZYLI JAK OBRACA SIĘ MAŁY SAMOLOT (Vans RV6)
Ten tekst poświęcam głównie prędkości asymptotycznej obrotu, ale policzyć można także moment pary sił od lotek i podzielić przez oszacowany z dokładnoscią 15% moment bezwładności samolotu równy Ixx= 800 kg*m2. To daje początkowe przyspieszenie obrotu (por. Uzupełnienie)
B/Ixx = (dω/dt)o ~ (2 n L M)/(3π Ixx) * (Δα /α) [(1- x1 2)3/2-(1- x2 2 )3/2] ~200o/s2.
W przypadku RV6, wychylenia lotki to +31o (do góry) do -17o (w dół). Wiedząc, że lotka jest węższa, niż skrzydło (bez niej) w stosunku 1:4.6, można oszacować geometrycznie zakres zmian efektywnego kąta mocowania skrzydła (a przez to zmianę AOA): Δα = 5.4o + 3.1o = 8.5o.
Ponieważ V/L = 70(m/s)/(3.5m) = 20/s, to
ωmax RV6 = 0.42 Δα (V/L) ~ 0.42*8.5*20 st/s ~71o/s
A teraz, jak to jest naprawdę, czy RV6 potrafi obrócić się np. o pełen obrót w czasie
360o/ωmax RV6 = 360o/ (71o/s) = 5 sekund?
Zrobiłem beczkę. Potrafi. Zobaczmy to wideo, albo dowolne inne wideo obracajacego sie lotkowo samolotu RV6. Faktycznie samolot potrafi, mniej więcej w 4.5-5 sekund zrobić beczkę. Efekt początkowego rozkręcania trwa rzędu ~ωmax RV6 / (dω/dt) ~ 70/200 s <0.35s, całkiem krótko. Podobnie szybko jest beczka później hamowana. Na czas rozkręcania i hamowania składa się też płynne zwiększanie/zmniejszanie wychylenia drążka sterowego (nie wolno tego robić zbyt szybko, przy prędkości ~127 kt). Można więc oszacować z przebiegu całości beczki, jak i z czasu obrotu pomiędzy pozycjami o przechyle różnym o kąt prosty, że ωmax RV6 ~ 90o/s. Dobrze widać to zwlaszcza na trzecim wideo przy wielokrotnym obrocie. Błędy przybliżeń, jak i błędy pomiaru obrotu z wideo są rzędu 15o/s. W takim zakresie mamy całkiem niezłą zgodność. Teoria działa, tylko daje lekko zaniżone w stosunku 7:9 tempo obrotu. Przypisuję to idealizacji eliptycznego rozkładu siły nośnej na płacie. Poprawka na nieeliptycznosc daje
ωmax RV6 = 0.54 Δα (V/L).
JAK OBRACA SIĘ NIEUSZKODZONY TUPOLEW
W przypadku TU-154M wychylenia lotki to +-20 stopni. Wiedząc, że lotka jest węższa niż skrzydło bez niej w stosunku 11:28, można oszacować geometrycznie zakres zmian efektywnego kąta mocowania skrzydła (czy AOA): +-5.9 stopnia. W sumie zatem zakres zmian równy jest Δα = 11.8o. Ponieważ V/L = 75(m/s)/(19m) = 4 s-1, to już to samo, abstrahując od trzy razy mniejszej wartości współczynnika R, powoduje bardzo wolny, dziesięciokrotnie wolniejszy obrot tupolewa, w porównaniu z samolotem akrobacyjnym. Jest to głównie wywołane dużą długością L skrzydła tupolewa, co daje małe V/L, oraz bardzo krotką lotką, w porównaniu ze skrzydłem, 13% długości skrzydła (podczas gdy 35% w RV6). Pozostałe zmienne, takie jak zmiana kąta natarcia na lotkach Δα i prędkość postępowa V, są zbliżone.
Jeśli chcemy kręcić szybkie beczki lotkowe i inne, samolot musi mieć jak najkrótsze skrzydła, a jak najdłuższe lotki. Dlatego, poświecajac nieco doskonałosci aerodynamicznej w locie ślizgowym, jaką miałby przy bardziej wydlużonych skrzydłach, samoloty typu RV6 mają krótkie skrzydła. Dodatkowo, są one dzięki temu bardziej wytrzymałe. Tupolew nie powinien przekraczać przyspieszenia n=+2.5g (-1g), a RV6 n=+6g(-3g). Mały samolot jest więc prawie 3 razy bardziej wytrzymały niz tupolew pod tym względem.
Z tabelki wynika, że ωmax TU154 = 0.154 Δα (V/L) ~ 0.154 * 11.8o *4/s ~ 7.3o/s (zbieżność współczynnika liczbowego i nazwy samolotu jest przypadkowa, ale łatwo go w ten sposób zapamiętać. Z kolei, dla RV6 to była słynna liczba "42", ktora jest odpowiedzią na zasadnicze pytanie z Przewodnika Autostopowicza po Galaktyce, skąd przybyła do salonu24 postać Forda Prefecta). Po korekcji na uproszczenia w teorii eliptycznej siły nośnej (czynnik 9/7 wspomniany powyżej) to daje
ωmax TU154,lotki = 0.198 Δα (V/L) ~ 0.198* 11.8o *4/s ~ 9.4o/s.
To ciągle za mało. W rzeczywistości jest wiecej! Oto skąd to wiemy.
Korekta ze względu na lotkę-interceptor [ostatnia redakcja 4 marca]
Tempo "przekładanki" z jednej strony na druga, związane głównie z maksymalnym tempem obrotu, opisane jest u Piatina (1994, str. 32), którego włączam do bibliografii wraz z orginalnym tekstem. Wg. tej pracy maksymalne tempo obrotu tupolewa 154B przy klapach wysuniętych na 45 stopni i wolancie przekreconym o 100 stopni, wynosi około 60o/3s czyli 20o/s. Nie jestem pewien, czy można te dane przyjać bezkrytycznie, bo to nie TU-154M przy klapach na 36 stopni. Załóżmy, że w rzeczywistości obrót maksymalny jest pośredni, 18o/s.
ωmax TU154 = 2.5 * 0.154 Δα (V/L) ~ 0.384 * 11.8o *4/s ~ 18o/s.
Wstawiłem tu czynnik 2.5 > 9/7, którego nie było w orginalnej, prostej 'teorii eliptycznej', a który wymagany jest by dostać cytowany realistyczny obrót ~18o/s.
Skąd się może brać ta duża korekcja, czemu można ja przypisać? Częściowo wspomianemu wyżej efektowi nie-eliptyczności funkcji rozkładu, to czynnik 1.29, ale w wiekszości (czynnik 1.94) wychyleniu lotki-interceptora na opadajacym skrzydle. Ta powierzchnia kontrolna, położona na górnej części profilu, podnosi się maksymalnie aż o kąt 45o wraz z lotką (np. w przypadku PLF101 wychylenie doszło do 40o; por. rys. 25 rap. MAK). A więc korekcja dla czystego efektu lotkowego powinna wynosić 2.5 razy ponad naiwne oszacowanie dane wzorem ωmax = R2 Δα (V/L). Wzór ωmax TU154 = 0.384 Δα (V/L) opisze poprawnie tupolewa nieuszkodzonego, obracającego się przy użyciu dwóch lotek i lotki-interceptora (hamulca powietrznego). Z tego, 26% działania przypisujemy każdej z lotek, a 48% lotce-interceptorowi.
CZY BĘDZIE COŚ O KATASTROFIE?
Uaktualniam nieznacznie model ostatnich sekund lotu PLF101 w Uzupełnieniu 2.
Jesli chodzi o obrot: zauważyć można, że pełne wychylenie interceptora w locie PLF101 to 40o, dwa razy tyle, co maksymalne wychylenie lotki, więc ich wpływ na obrót może być rzeczywiscie porównywalnej wielkości, przy czym interceptor dominuje efekt jedynej lotki pozostalej po urwaniu koncowki skrzydla. 48% (interceptor) plus 26% (jedna lotka) to 74%. Odpowiednio, dzialajace powierzchnie kontrolne na prawym skrzydle wymuszaly moment obrotowy ktory mozemy opisac odpowiadajacym mu tempem obrotu ustalonego
ωmax PLF101 = 0.285 Δα (V/L), albo wartoscia rowna 18o/s *0.74 = 13.3o/s.
Maksymalna prędkość obrotu oszacowana dla uszkodzonego samolotu z urwaną 1/3 długości lewego skrzydła wynosiła ~53o/s, nieco więcej niż poprzednie oszacowanie ~50o/s, gdzie slaty i wszystko jest niepogniecione i nie pourywane, na lewym skrzydle. Obrót z jedna dzialajaca lotka odbywa sie w tempie 0.5*9.4o/s, różni sie on o czynnik 11 od obrotu wymuszanego przez urwane skrzydlo (53o/s). Natomiast obrót lotkowo-interceptorowy uszkodzonego tupolewa odbywa sie w tempie 13.3o/s, różni sie zatem o czynnik 4 od obrotu wymuszanego przez urwane skrzydlo. Wychylona lotka+interceptor redukuje tylko ok. 1/4 tendencji do obrotu i nie jest w stanie zatrzymac obrotu.
Rzeczywiście, takie wyniki potwierdza numeryczne rozwiązanie zagadnienia macierzowego w uogólnionej teorii Prandtla: w mojej symulacji aerodynamicznej nie uwzglednialem intereptora, ale lotka wychylona przez pilotów dala spowolnienie obrotu o rzad wielkosci mniejsze, niż konieczne do zatrzymania obrotu. Teoria ta jednak nie bierze pod uwage interceptorów, i lepiej w zgodzie z powyższymi wyjaśnieniami wziąć sumaryczny efekt lotki i hamulca powietrznego na prawym skrzydle jako 4 razy mniejszy co do wartości absolutnej, niż zarówno maksymalne tempo obrotu, jak i maksymalne przyspieszenie obrotu, policzone wg naiwnej teorii dla niewychylonych powierzchni kontrolnych.
To wszystko rozwiewa nadzieję, że lotka lub ślizg (podobnie mały efekt) mogły znacznie zmienić trajektorię beczki smoleńskiej. Zatem jeszcze raz potwierdza się opinia, że za brzozą Bodina lot był właściwie niekontrolowany, a los słabo chronionych od strony sufitu pasażerów - przesądzony. Cofając się przed brzozę Bodina, myślę, że beczka i destrukcja PLF 101 były nieuniknione już ~200 metrów czyli prawie 3 sekundy przed napotkaniem jej. Wypadek lotniczy był bardzo prawdopodobny już kilkaset metrów wcześniej, ale nie koniecznie w postaci feralnej beczki.
ZAKOŃCZENIE
Zakończę jeszcze jednym powiedzeniem wielkiego fizyka, The grand aim of all science is to cover the greatest number of empirical facts by logical deduction from the smallest number of hypotheses or axioms. Czyli: nadrzędnym celem nauki jest wyjaśnienie jak największej liczby faktów empirycznych przy użyciu jak najmniejszej liczby hipotez lub aksjomatów. Hipoteza beczki rozpoczynającej się koło brzozy Bodina w istocie tłumaczy wielką liczbę różnorodnych danych empirycznych o katastrofie. I tylko ona. Inne hipotezy nie są nawet porównywalne. Hipoteza wybuchu nic nie tłumaczy, jest sprzeczna z danymi. Ale o tym już, zdaje się, kiedyś mowiliśmy?
___________________________________________________________________
UZUPEŁNIENIE 1 - RÓWNANIE OBROTU
Przy użyciu wprowadzonych oznaczeń, równanie zmian prędkości obrotu, Ixx dω/dt = T, można zapisać jako
Ixx dω/dt = Ixx (dω/dt)o (1 -ω/ωmax) = B - A ω
gdzie B=(dω/dt)o Ixx , natomiast A = B/ωmax
i oczywiście także łatwo rozwiązać, zakładając, że B i A nie zmieniają się w czasie (rozwiązania - zob. komentarz Rado w dyskusji). W powyższej postaci równanie znalazło się w moim programie, który był omawiany wcześniej, jako ....= dwdt*(1-w/w0), o ile pamiętam. To to samo, co forma B-Aω.
Jesli już rozwiazywać równanie obrotu zmiennego w czasie, ale ze stałymi współczynnikami, to można to zrobić albo w jednej albo drugiej formie:
dω/dt = (dω/dt)o (1 -ω/ωmax) = (dω/dt)o - (A/Ixx) ω.
(dω/dt)o może być zapisane różnie:
(dω/dt)o = c CLaΔα (qV2L2/2Ixx ) ∫x1x2 (1 - xp)1/p x dx, gdzie CLa= dCL/dα jest standardowym nachyleniem wykresu współczynnika siły nośnej CL równym zwykle CLa ~ 4.5 (RV6) do CLa ~ 5 (TU-154). Maksymalnie, dla skrzydła nieskończenie długiego, CLa=2π. Szerokość skrzydła to c (chord), a gęstość powietrza to q. Można to jednak jednak zapisać prościej, wiedząc że siła nośna równoważy wartość nM, czyli przeciążenie razy mase samolotu.
(dω/dt)o = K(1,p,x1,x2)/K(0,p,-1,1) (Δα /α) (nML/Ixx), gdzie K(..) to bezwymiarowe liczby:
K(q,p,x1,x2) := ∫x1x2 (1 - xp)1/p xq dx.
Natomiast
A = c CLa (q V L3/2) ∫-11 (1 - xp)1/p x2dx. Dla p=2 upraszcza sie to do A = c CLa (q V L3/2) ∫01 (t(1 - t))1/2dt = πCLa c q VL3/16 . Widzimy, że A i B sa zależne od ciśnienia dynamicznego i kata natarcia płata, co czyni je zależymi od masy samolotu i innych parametrow, ale ich stosunek ωmax = B/A jest bardzo prosty (taki jak podałem na poczatku podrozdziału pt. Obrót Ustalony). Albo można policzyć to prościej
A = K(2,p,x1,x2)/K(0,p,-1,1) (nML2/Vα)
Stąd wnika też ωmax = K(0,p,-1,1)/K(2,p,x1,x2) (V α Ixx / n M L2). Zachęcam do własnych oszacowań wartości.
_________________________________________________________________________
UZUPEŁNIENIE 2 - Uaktualnienie modelu PLF101
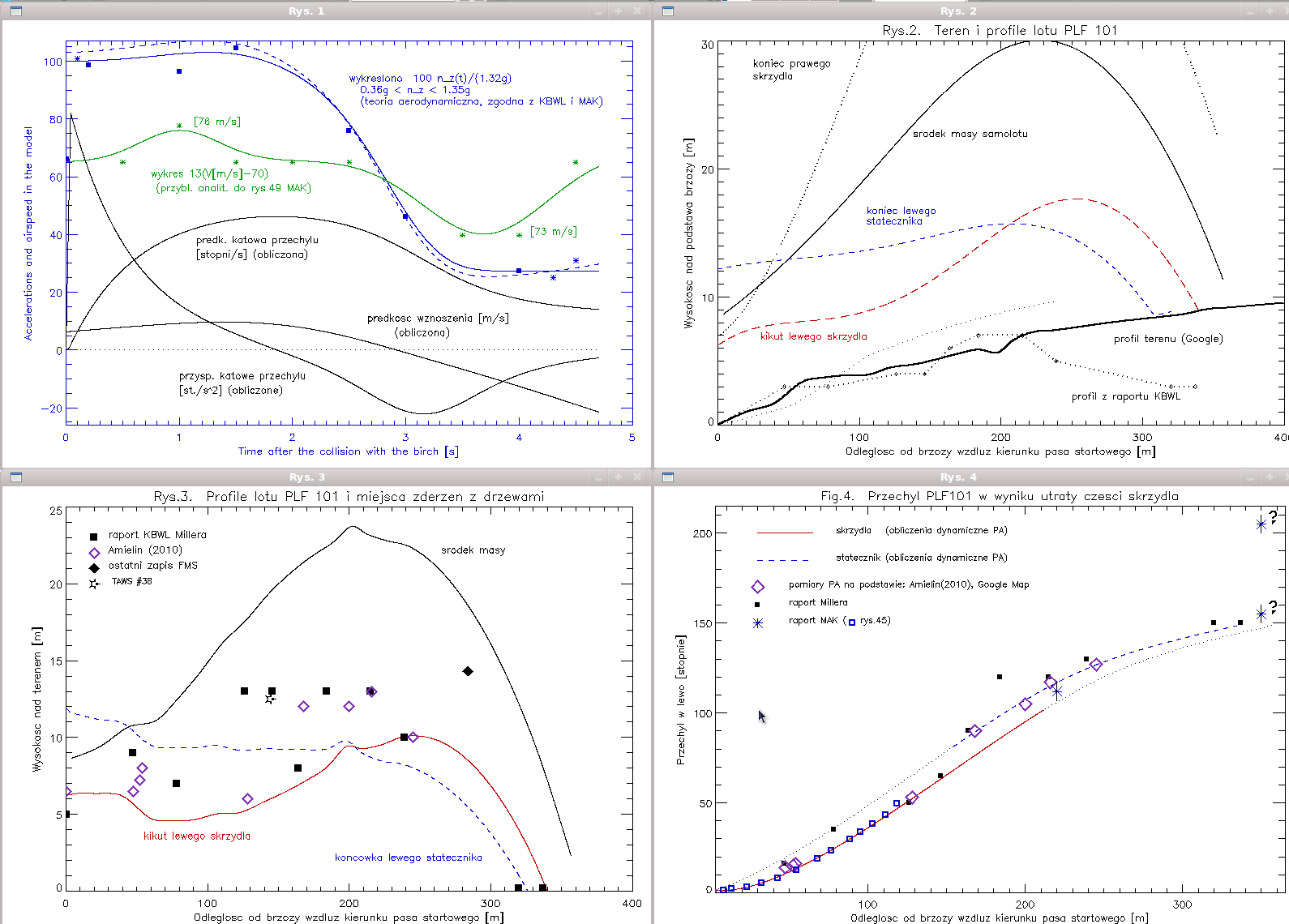
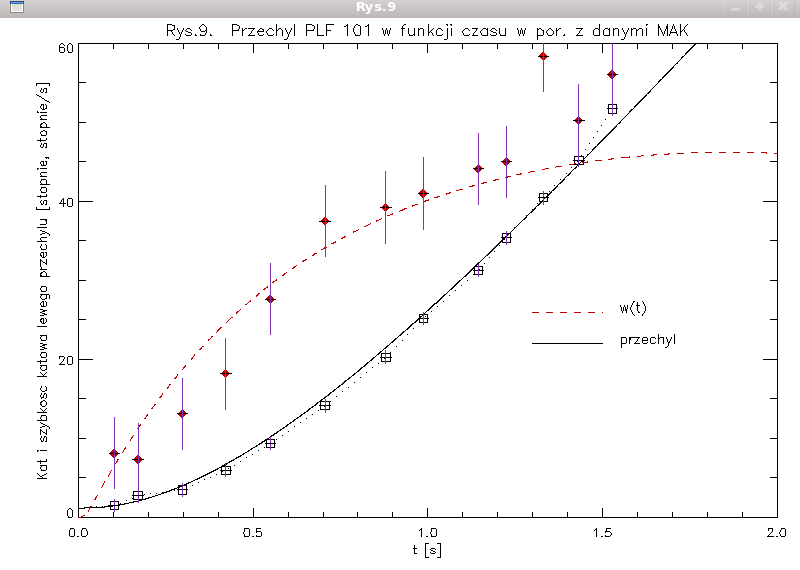
Na tym rysunku podaję model lotu PLF101 z niewielką zmianą krzywej przyspieszenia pionowego nz(t) i z nieco wzmocnionym, dokładniej oszacowanym, wpływem lotki, która spowalnia przechył. Przyspieszenie nz(t) jest teraz nieco większe koło punktu maksymalnego nz(t) ~ 1.36 tak, by lepiej opisać jego okolice. Samolot obraca się przez to nieco szybciej. W wyniku przeciwstawnych efektów samolot osiąga końcowy kąt przechyłu o małych kilka stopni większy niż przedtem. Tutaj można zobaczyć początek beczki: kąty i szybkość obrotu, w por. z danymi na rys. 45 raportu MAK. Zob. też dyskusję o beczce w komentarzach. Tutaj można znaleźć najnowszą wersję programu ykwPLF101.pro.
Zobacz galerię zdjęć:







{kind=link}
{kind=link}
Komentarze